高端医疗设备展看医疗机器人十年飞跃:一文回顾8大关键技术主题!
2023-07-19
-
开放平台内窥镜手术机器人(ppen platform laparoscopic robots) -
外科手术自动化(surgical automation) -
导航、术中成像和可视化(navigation, intraoperative imaging, and visualization) -
接触力感知与控制(contact force sensing and control) -
单孔内窥镜手术机器人(single-port laparoscopic robots) -
可分离外科手术机器人(detached surgical robots)
-
腔内和自然开口手术(endoluminal and natural orifice surgery) -
显微手术(microsurgery)
重点领域包括:
动力下肢假肢(powered lower limb prostheses)
神经控制的上肢假肢(neurally controlled upper limb prostheses)
下肢外骨骼(lower limb exoskeletons,LLEs)
# 康复治疗机器人
(Therapeutic Rehabilitation Robots)
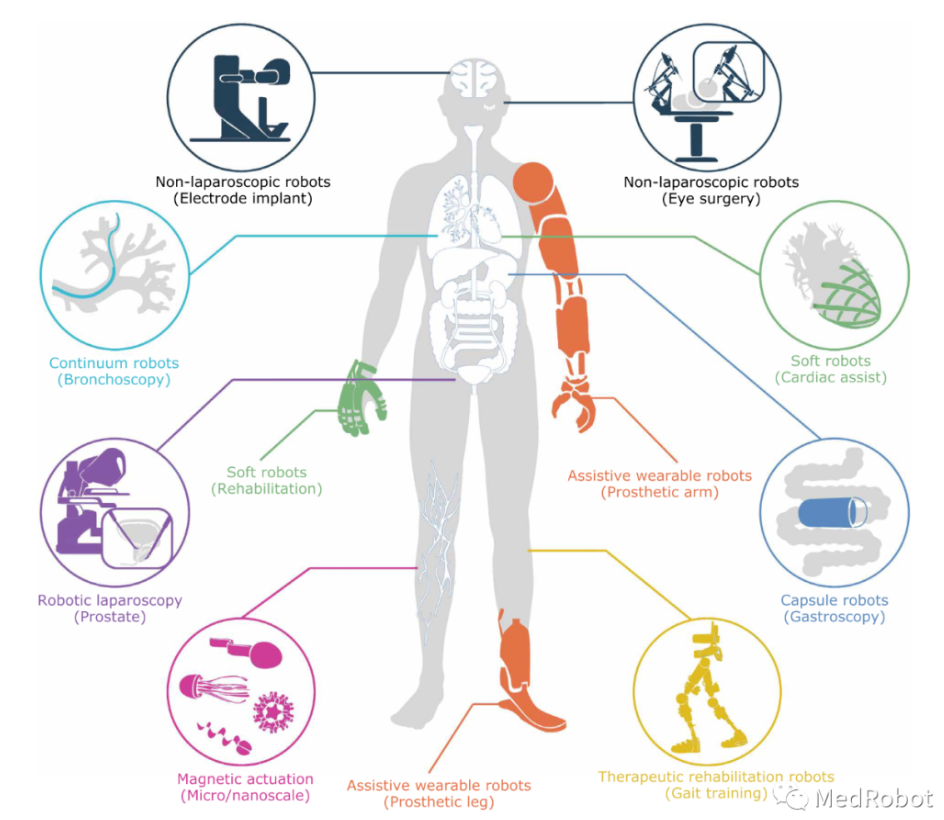
辅助外骨骼和假肢旨在取代损失的功能,而康复机器人的设计目的在于神经损伤(最常见的是中风和脊髓损伤)后为肢体提供重复运动治疗,从而恢复患者自身能力。治疗辅助机器人设备能够诱导或促进神经可塑性,执行伸手、抓握、行走和脚踝运动,从而恢复运动范围和运动协调,恢复患者的肢体功能,在某些情况下,能够在没有机器人设备支持的情况下提供自我护理、独立生活,甚至在受伤后重返工作岗位。
自20世纪90年代初引入,康复机器人作为提供精确、重复运动治疗的手段,在设计、制造、控制和临床转化方面取得了重要进展。在2010年前的十年中,主要研究成果包括为神经康复开发的第一代机器人设备的临床评估和商业化,包括用于步态康复的外骨骼,如Lokomat,以及用于上肢康复的末端执行器型机器人,如InMotion ARM。自最初的发展以来,在21世纪初,研究人员开始为上肢开发新的外骨骼型机器人,该机器人可针对肘部和肩部远端的特定关节运动,而下肢外骨骼则可促进地面行走。2010年-2020年,研究者们完成了控制算法的基础性工作,这旨在更好地协调机器人和患者之间的运动。
重点领域包括四个方面:
第一,新颖的外骨骼样式设计,关注上肢的远端关节,并在驱动和结构上都融入了柔顺性和软体材料;
第二,新控制算法的开发,以调节患者与机器人之间的交互,最大限度地提高患者参与性。
第三是,意图检测方法的创造,以推断和支持病人想要的动作,而不是规定或预先编程机器人运动轨迹。
第四,对神经恢复进行客观和定量评估的机器人装置的推广使用。
未来展望:
未来的研究工作将侧重于更好地理解神经可塑性的机制,包括如何可靠地诱导和利用它来最大限度地提高治疗效果。这依赖于神经科学的进步,包括记录神经元活动的新技术。机器人技术的进步对实现上述目标也至关重要,包括开发更合适的设备,以及嵌入设备中的更精确的传感和致动,以确定可最大程度促进功能和独立性恢复的上肢和下肢的远端自由度。最后,先进的控制算法可以更准确地实时表征患者的能力,不仅可以调整完成动作所需的支持水平,还可以施加适当的阻力或挑战。
# 胶囊机器人(Capsule Robots)
世纪初,Given Imaging(现美敦力)推出了无线胶囊内窥镜,作为检查胃肠道的微创方法。只需吞下一粒“药丸”就可以收集肠道深处的图像,这一可能性彻底改变了胃肠镜领域,并引出了一个全新的研究领域:胶囊医疗机器人。
研究者很快就认识到,传统的胶囊内窥镜在胃肠道中被动移动,受到无法与肠道相互作用并进行干预的限制。解决这一问题的第一个自然方法是采用“机载驱动”,使用内部微型运动机构(如腿)主动控制胶囊。然而,学界对这种方法的热情迅速下降:使用现有技术,将包括充足电源在内的复杂机制集成到“药丸大小”的设备(通常长度为24毫米,直径为11毫米)中是不切实际的。
为了解决这一问题,研究者探索了磁驱动的替代方法。磁耦合的使用绕过了对复杂机构的需求,减少了板载功率需求,从而降低了设备的总体尺寸和复杂性。这种形式的致动通过外部产生的磁场操纵胶囊(包含嵌入式磁体)。这种简单的机械布置可以精确地控制胶囊定向并产诱导相对运动。磁场可以由永磁体或电磁体产生,电磁铁在改变磁场大小方面可提供更好的控制程度,但产生的体积磁通密度低于永磁体。医疗胶囊机器人现在是标准介入内窥镜检查的可行的临床替代品。
未来展望:
在下一个十年开始之际,胶囊机器人将与智能磁控制和多模态成像(如多光谱、自发荧光和微超声)和微/纳米机器人相结合,提供前所未有的诊断和治疗能力。除了临床用途外,还可以提供研究平台,深入人体,解决与微生物组等相关的其他科学问题。
未来,在能量存储或无线电力传输方面还可能取得令人兴奋的进展,将重振板载驱动方法或“多尺度操作”,如一个胶囊器人部署一支介入微型机器人大军。无论未来如何,医疗胶囊机器人始终都是一个令人兴奋、快速发展且极具影响力的研究领域。
#磁驱动医疗机器人
(Magnetic Actuation for Medicine)
早在被用于身内成像之前,磁场就被用于进行手术。使用磁场提取意外嵌入眼睛的铁屑的记录至少可以追溯到17世纪和工业革命期间。20世纪50年代,首次对磁场用于引导尖端安装有磁铁的导管进行了研究。
然而,直到2003年,Stereotaxis的Niobe机器人磁导航系统才用于商用,该系统使用两个移动的永磁体产生变化的磁场,用于引导心内膜消融导管治疗心律失常(电生理程序)。尽管这种磁导导管系统的市场渗透率一直很低,但在过去的十年中,研究人员和医疗器械公司的对其兴趣愈发浓厚,关于该主题的论文数量呈线性增长。
重点领域包括:
-
多自由度电磁导航系统建模(modeling multi-DOF electromagnetic navigation systems)
-
磁引导微型机器人(magnetically guided microrobots)
-
毫米尺度上的磁运动策略(magnetic locomotion strategies at millimeter scales)
-
磁引导导管(magnetically guided catheters)
# 软体医疗机器人(Soft Robotics for Medicine)
软体机器人本质上是柔顺结构和智能材料,从一开始就与仿生学和生物灵感密切相关。另一方面,人们对柔体仿生机器人日益增长的兴趣,也促进了智能材料的研究,这些智能材料可从宏观尺度到纳米尺度,用于制造软体机器人或为其提供传感和驱动能力。比如,大多数关于具有传感能力的人造皮肤的研究,都可以在应用软体机器人和设备的文献中找到。
纵观过去10年的文献,有许多关于软体仿生机器人各种应用的基础性综述或调查性论文,也有许多关于新型智能材料的研究论文和综述,其中,传统的硅基传感技术被具有智能行为的硅基技术所取代。
就过去10年的高被引论文而言,排除材料研究论文和调查性论文,可以将软体机器人分成两类:一种是用于康复或人体增强的可穿戴软体机器人。第二种包括介入和外科手术机器人或相关组件。
在介入和手术领域的三个主要主题是:
(1)用于手术或介入的软体设备,其中整个传统设备被宏观和微观规模的软体机器人设计所取代;
(2)软体、仿生或顺应性的组件,可作为独立的设备工作,或者集成到传统系统中;
(3)高级模拟器的软体组件和系统,用于训练和研究机器人和生物人工器官之间的特定生理功能。
尽管软体机器人领域还没有产生代表性的范例,但正在指导大多数医疗器械的设计和开发。与此同时,软体机器人技术也在促进软体材料和新型制造技术的研究,从而在生物医学应用中开辟意想不到的途径。
# 连续体医疗机器人(Continuum Robots for Medicine)
连续体机器人通过弯曲变形而不非离散关节来改变形状,与传统的机器人机构相比,由于能够实现3D变形,这种机器人可通过更小的通道进行手术。它们可以通过自然开口进入人体内,通过体内腔导航,在通过实体组织时绕过关键结构。与传统设计相比,连续体机器人的弯曲顺应性也提高了其安全性。
在2010年之前的十年中,主要的研究进展涉及开发肌腱和多骨架驱动连续机器人结构的设计原理和基于力学的运动学模型。这促成了医疗机器人商业化,例如汉森医疗的肌腱驱动心脏导管。
此外,高端医疗设备展Medtec China了解到了一种肌腱驱动设计,用一系列由球形关节连接的短圆柱连杆代替柔性主干。这一设计成为Medrobotics公司商业化手术机器人的基础。在2000年代,同心管机器人的概念首次被引入,但直到2010年才完成对该架构的设计原理和运动学模型的完整描述。
在2010年至2020年的10年间,连续体机器人的研究主要集中在四个领域:
-
在机器人建模和控制中整合外部接触和负载
-
开发控制机器人刚度的方法
-
创建软体连续体机器人
-
设计用于特定临床应用的连续体机器人。
重点领域包括:
-
扩展运动学模型以纳入外部接触和载荷(extending kinematic models to consider external contacts and loads)
-
刚度控制(stiffness control)
-
软体连续体机器人(soft continuum robots)
-
特定应用的连续体机器人设计(application-specific continuum robot design)
# 讨论
进一步推进医疗机器人的发展,离不开对机器人及其底层技术如何使医学增值的深入理解。尽管在几乎所有其他行业,普遍认为机器人作为自主体以降低人力成本,但医疗机器人,至少到目前为止,都是在其他应用方面带来附加值。
例如,
在康复治疗中,可以说,目前增值在于提供更多的重复次数,而非提高重复的质量;用于放射治疗的能量输送机器人提供了其他方式难以匹配的精度、可重复性和速度的组合;与非机器人设备相比,电动假肢可以通过扩大日常生活任务的数量和质量来直接改善患者的预后;胶囊机器人最终可能取代一些肠道开放手术,改善难以到达的身体区域的诊断,并减少现有腔内肠道手术的不适。
在指导机器人技术研究以实现增值最大化的过程中,最重要的技术目标是实现基于现有技术所无法实现或者不切实际的新型干预措施。在未来十年,软体机器人很可能成为一项非常重要的使能技术。目前大部分最有前景的工作都是在材料领域,涉及带有嵌入式传感器和驱动器的薄聚合物层制造。尽管目前这项工作看似与医疗应用很遥远,但这些能力可能会对介入、康复和辅助机器人产生巨大影响。其他的传感、成像、驱动和储能等使能技术可能会为消费类电子产品带来跨越式发展。
一项技术除了能够催生出一种新的手术型式外,若可使医疗机器人增值,也同样具有非凡意义。术前和术中成像与灵活的、符合人体工程学的增强手术工具相结合就是一个很好的例子。这种方法的价值可能在未来还会持续增长。将实验室细胞和分子成像转化到体内原位手术中,为宏观和细胞级的治疗提供改善的组织探测、标记和靶向,将进一步扩大手术干预的功能能力。通过简化术中决策制定与优化,并使其具有更高的一致性和准确性,避免潜在的术后并发症,能够从根本上改变手术路径规划。
另外一种机器人增值的方式是通过增加自主性。医疗机器人自主性的技术前沿,在于赋予机器人基于实时传感器数据制定和改变其计划和运动的能力。例如自主腹腔镜手术切除癌性病变或自主经导管心脏瓣膜修复。这种程度的自主性不仅带来了技术上的挑战,还带来了监管、伦理和法律方面的问题尚待解决,并将提高商业化成本。因此,在现有的医疗机器人中逐步增加这种自主功能将会容易得多,这些机器人的价值可以在不考虑自主功能的情况下得到证明。例如腹腔镜手术的自动缝合,柔性内窥镜的自主导航,或心脏内自主电生理导管标测。
渐进自主化的进化趋势(如下图所示)将为算法和传感器等必要技术的研发提供时间,同时,让利益相关者有时间逐步构建适当的监管和法律框架。短期内,必须具备自主能力的在医疗机器人的商业化将更具挑战性,但长期看来可能具有最高价值。
自1990年以来发表的19000多篇关于医疗机器人的工程论文中,只有少数可以为现有的商用医疗机器人赋能。即使的具有高技术影响力的论文,其专利引用数量也不多。在某种程度上,这可能是由于技术开发与其商业应用之间的巨大滞后。技术研究与医疗器械商业化现实之间的不匹配也是影响因素之一。
将机器人技术应用于临床,需要的不单单是被引用的研究文章,必须要确定真正临床需求,必须要开发相关的技术来满足这临床需求,并考虑机器人如何为临床医生和患者增加价值的细节。技术的开发还必须充分考虑医院的行政和财务限制,不妨碍完善的临床工作流程;必须尽早识别潜在风险,以便获得伦理批准;必须开发有吸引力的商业模式,以确保能够获得足够的投资,使该技术顺利通过医疗设备获得商业成功必经的复杂途径。要最大限度地提高成功的几率,技术研究者者必须走出象牙塔,与临床医生、监管机构、投资者和商界建立深入的合作。
文章来源:MedRobot