这一仿毛毛虫机器人登上Science头条!医疗器械展览会观察这一研发新“品”如何造势?
2023-03-30
软体机器人是由柔性材料加工而成的,可以任意改变自身尺寸,与刚性机器人相比具有高顺应性、适应性和安全性等特点在生物医学工程、手术辅助、主动假肢、伪装和感知技术方面引起了学者的广泛关注。研究人员一直在探索如何使用各种外界刺激对软机器人实现驱动,包括压力、热量、电场、磁场和化学势。在各种类型的刺激中,电刺激是最简便的刺激之一;该类制动器中使用最广泛的是离子或场激活的电活性聚合物。对于一般的电刺激致动器,离子激活过程通常在电解质环境中进行,而场激活则需要高电压(>1kV)。另一种类型的电刺激致动器,热双晶致动器,基于两种材料的热膨胀系数不匹配。由于其可编程操作、重量轻、低致动电压、无电解质以及可远程操作(例如,通过无线充电驱动)等潜力,引起了人们的广泛关注。
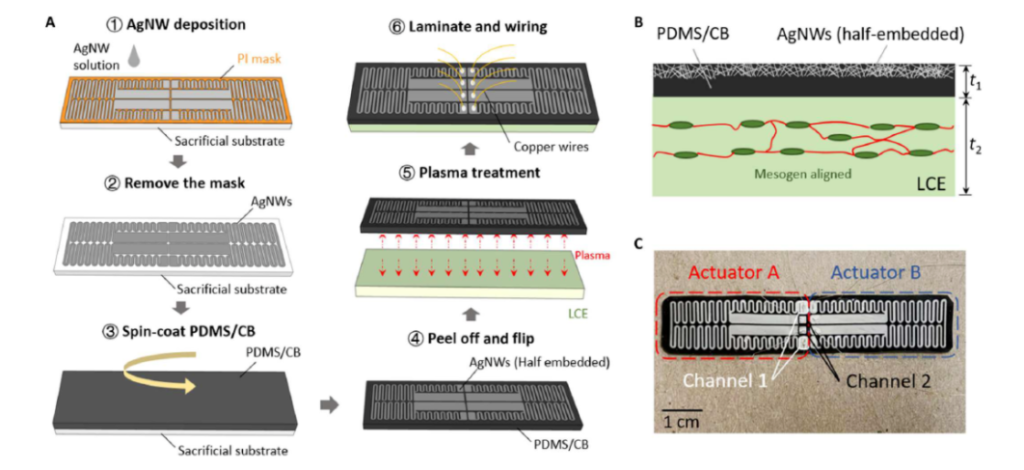
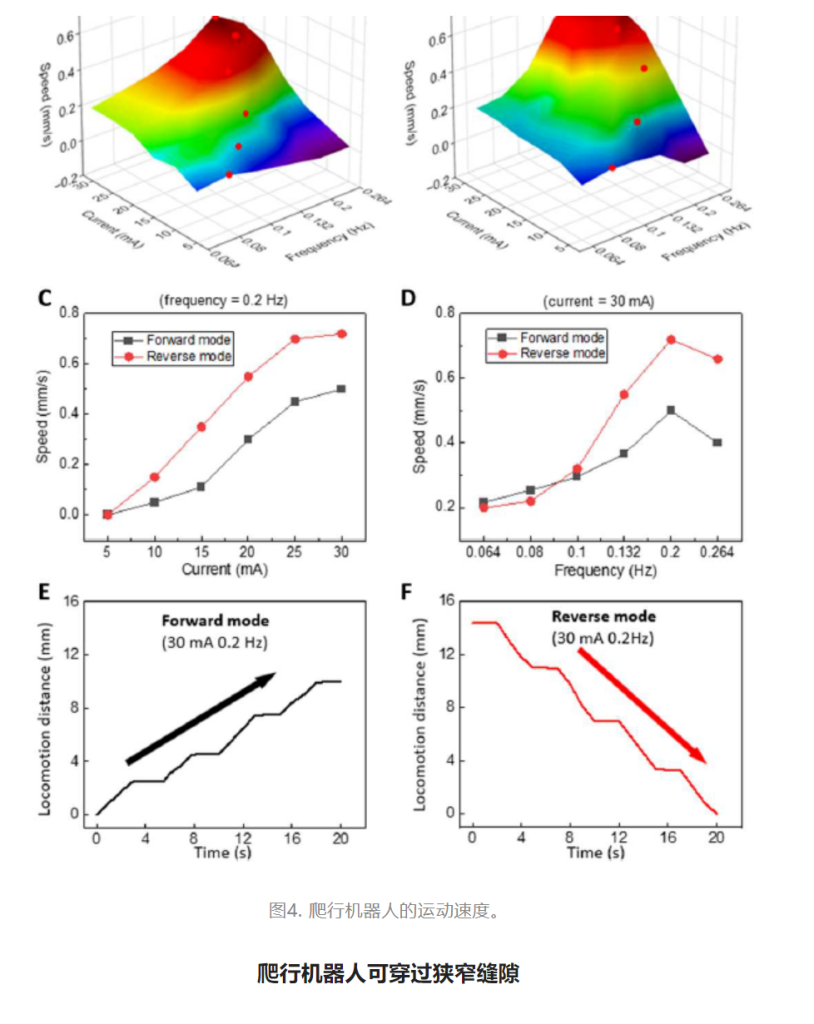
鉴于此,医疗器械展览会Medtec China 2023近期了解到北卡罗来纳州立大学朱勇教授团队提出了一种受毛毛虫启发的双向爬行机器人,该机器人具有多种运动模式,通过在基于液晶弹性体(LCE)的热双晶致动器中对分布式可编程银纳米线(AgNW)加热器进行焦耳加热来实现运动。通过对AgNW的加热模式进行设计和可编程加热,实现了不同的温度分布和曲率分布,导致机器人前端和后端与地面之间的摩擦不同,从而实现双向运动。作者表征了爬行机器人在正向和反向运动中的性能,并展示了其通过狭窄缝隙的能力;还通过实验和有限元分析研究了机器人的运动模式、爬行速度和通过狭窄间隙的能力。该研究以题为“Caterpillar-inspired soft crawling robot with distributed programmable thermal actuation”的论文发表在最新一期《Science Advances》上,并作为《Science》头条报道。
春江水暖鸭先知,许多专注于医疗机器人等医械产品设计研发的企业也纷纷入驻医疗器械展览会Medtec China 2023展会现场,包括迈得Maider,米克朗,赛能,IMA spa,欧赛斯,艾利特等,点击快速预登记,来现场看火热与前沿展品。
自然界中的毛毛虫可进行双向运动。在向前运动的过程中,毛毛虫在固定前部的同时收缩一些后部,使尾部向前移动,在后部产生一个特征性的隆起。随后,它在锚固终端尖端的同时释放隆起。整个躯体再次变平,实现向前移动一步(图1A)。在反向运动过程中,毛毛虫将末端固定在地面上,然后身体中部剧烈收缩,使整个身体向上拱起。然后,在固定前部的同时,躯体释放隆起,再次变平并向后移动一步(图1B)。实现双向运动的关键是控制身体弯曲。图1C和D展示了当不同的加热通道(或模式)被加热时,爬行机器人的正向和反向运动。当加热器关闭时,弯曲的双晶片结构的松弛使致动器向前或向后完成一个运动周期。
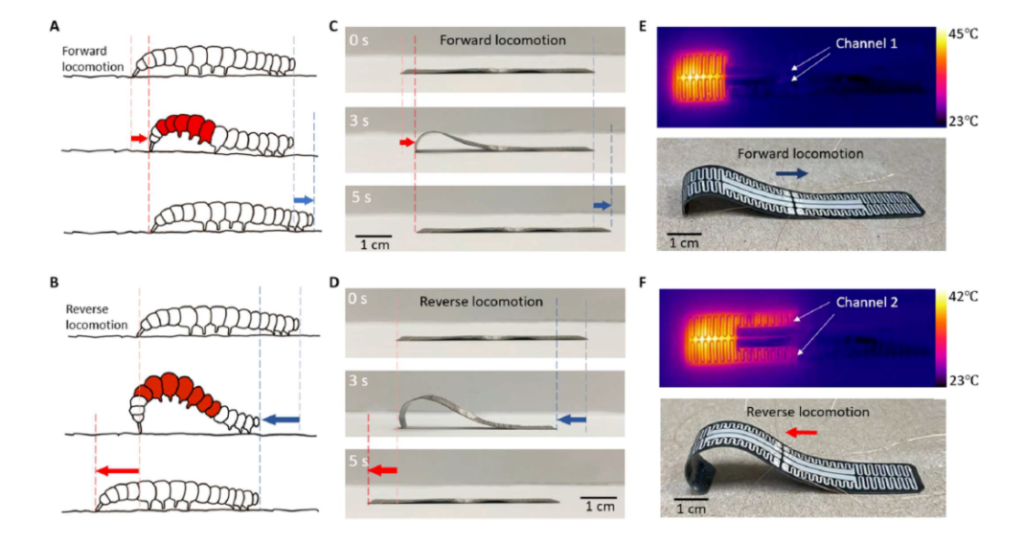 图1. 仿生爬行运动。
图1. 仿生爬行运动。
医疗器械展览会Medtec China 2023同期会议“第六届医疗器械设计论坛”特邀业内权威嘉宾,与医疗器械制造商和设计公司一同分享最前沿的产品设计理念与方式。议题包含内镜/机器人/家用康复医疗设备的研发设计要点,医疗器械研发流程介绍、研发中的设计思维:衔接用户洞察和产品创新、高端仪器装备的研发中需要怎样的设计等,点击快速预登记。
–纤维素推荐–
文章来源 :