最新Nature Nanotechnology:如何使水凝胶“浪”起来!
2022-12-05
生物系统利用跨尺度的耗散体系实现信号的耦合与反馈,提供诸多动态功能,例如内稳态、昼夜节律、环境适应性和信号转导。它们启发了研究者设计新型动态自我调节材料,以超越经典仿生的刺激响应性材料。
在生物信号转导中,感知到的刺激会被转换为瞬态的中间信号,再通过反馈回路产生响应。这其中的热力学非平衡态条件促进了能量耗散体系的复杂动态功能。而合成材料中,尽管最近在耗散体系和反馈控制系统方面取得了进展,例如化学-机械反馈和物理/化学振荡器,但在非平衡条件下实现内稳态和信号转导仍未有讨论。如果这样的新型系统得以实现,这将为下一代生物启发智能材料提供新途径。
近日,芬兰阿尔托大学Olli Ikkala教授课题组和坦佩雷大学Arri Priimagi教授课题组联合报道了反馈控制水凝胶系统的内稳态振荡、以及受捕蝇草启发的材料信号转导的研究 (Feedback-controlled hydrogels with homeostatic oscillations and dissipative signal transduction),相关结果发表在国际顶级学术刊物《自然 ⋅ 纳米技术》(Nature Nanotechnology)。芬兰科学院博士后研究员张航博士为论文的第一作者,芬兰科学院研究员曾浩博士、坦佩雷大学Arri Priimagi教授、以及阿尔托大学的Olli Ikkala教授为联合通讯作者。
如何使水凝胶 “浪”起来
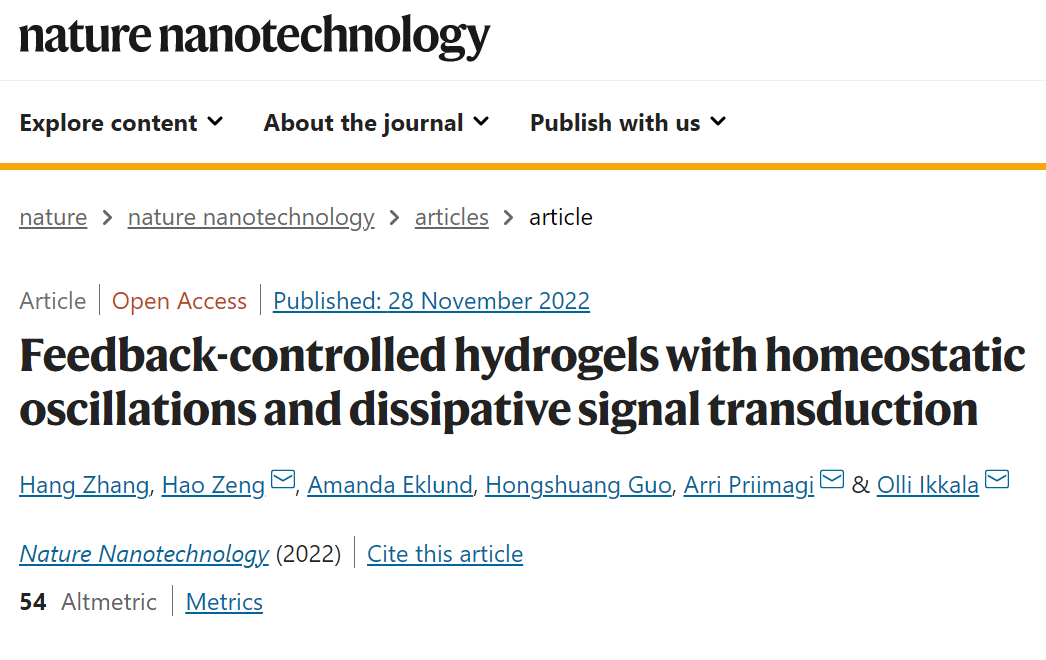
该工作选用具有热敏相变功能的聚 (N-异丙基丙烯酰胺) (PNIPAm)水凝胶,并在水凝胶的制备过程中通过去除作为牺牲模板的琼脂糖形成互连的多孔通道。该设计允许PNIPAm凝胶在最低临界溶液温度(LCST, 36°C)以下保持透明,并在LCST以上具有极强的光散射特性(图 1)。在室温下,激光束在透射点处穿过透明的PNIPAm通道,经过镜子反射到聚丙烯酰胺 (PAAm) 凝胶的入射点上。由于PAAm凝胶中包含可高效吸光的金纳米粒子,可以实现入射激光点处的局部光热加热,而热量则通过热传导延迟传递至透射点处的PNIPAm凝胶。当透射点处温度高于LCST,入射光束就会由于强烈的光散射而被阻挡,从而完全阻止光束到达 PAAm 侧,导致整个系统冷却下来。而当透射点温度低于 LCST,光束就可再次通过,从而开始新的一轮加热-冷却循环。由此,一个由负反馈回路控制的光热自振荡系统得以实现。 其可以提供稳定的温度自振荡或阻尼振荡,且自振荡的周期和振幅可通过控制激光强度或投射与入射点的间距进行调节。
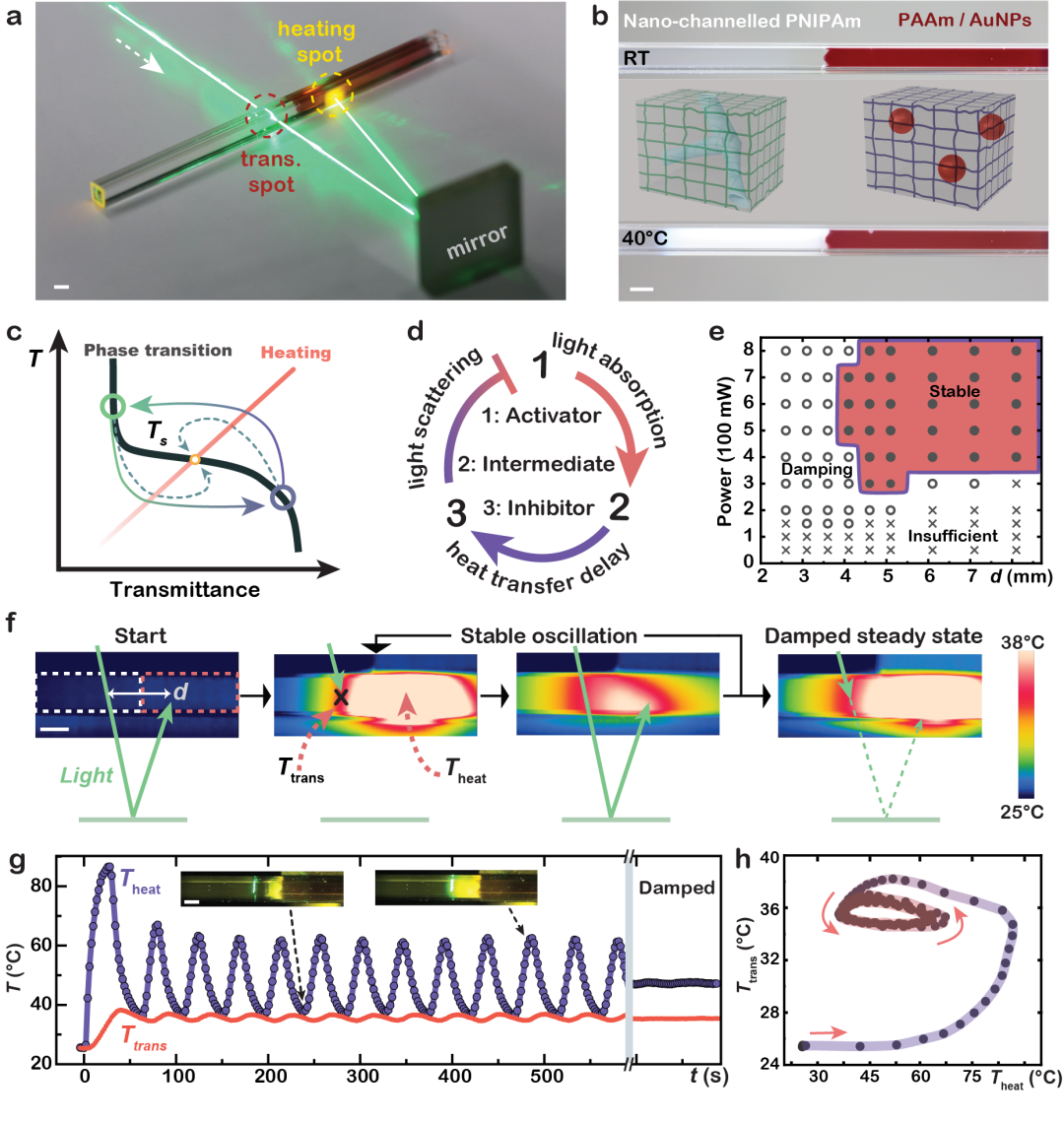
图1. 负反馈控制水凝胶的设计原理。
该水凝胶体系拥有与生物体系类似的内稳态,其在透射点上的温度可以稳定保持在36摄氏度,接近人体的体温。该温度由PNIPAm凝胶的相变温度(LCST)决定。无论外部给予何种刺激,如风吹、触碰、或改变光照强度,水凝胶都能通过负反馈控制来自我调节透射点温度的恒定,而不需要进行外界人为干预。给这个体系泼冷水,其会进入休眠状态。而在水分完全蒸发后,它的温度振荡会自发复苏到原始状态,如图2所示。
图2. 内稳态的休眠复苏过程。
此外,稳定的自振荡可用于驱动响应材料,从而获得耗散功能。如图 3所示,将光热自振荡与热致变色染料相结合,可以实现动态颜色显示。根据位置的不同和变色温度的选择,可以实现红色和白色的闪烁模式、持续的粉红色显示、或者稳定的黑色显示。将温度振荡转换为动态颜色展示了视觉信号和传感等应用的潜力。此外,还可以将热响应液晶弹性体(LCE)在凝胶管上排列成鳍状序列,由此实现由恒定光驱动的周期性弯曲形变。由于LCE鳍状执行器之间的不同振幅和时间延迟,可以在纸制模型货物上产生摩擦力偏差,从而使货物产生定向水平位移。此示例揭示了使用非调制光源在反馈控制下构建自主主动运输系统的可能性。
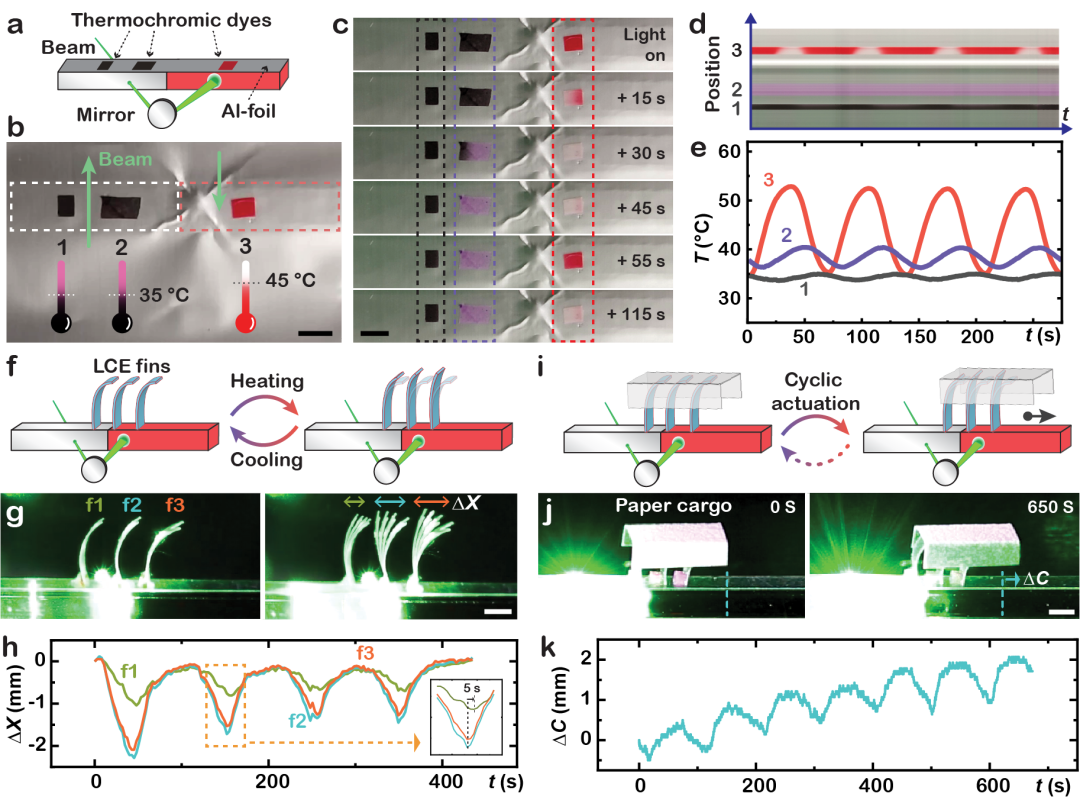
图3. 基于稳定震荡的应用展示。
让捕蝇草再次伟大
更为重要的是,该负反馈系统可以模仿生物体系的基于机械信号的信号转导(signal transduction)。我们都知道经典的植物机械响应模型系统含羞草,当触摸其时会导致叶子快速闭合(图 4),而另一个例子是捕蝇草,其叶片可以通过感觉毛感受到的震动而触发快速闭合以捕捉昆虫。尽管对捕蝇草中机械不稳定性的研究已经非常成熟,受其启发的人工仿生体系也有较多报道,但是迄今为止尚未实现对其更高级的植物算数(plant arithmetic)响应的模仿 —— 即植物可以通过感受机械触碰的次数和时间间隔来触发响应。本文作者提出了使用凝胶负反馈体系来实现对触碰频率感知的方法,从而超越了此前捕蝇草仿生体系中仅仅对机械不稳定性或刺激响应形变的模仿。在该系统中,凝胶在一定时间的稳定振荡后会进入受反馈控制的阻尼稳态。此状态对外界刺激的类型和幅度高度敏感,其中温度振荡可以在外部机械触发后恢复。这种机械响应性可用于在失衡条件下构建基于机械刺激-温度-机械响应通路的信号转导。作者首先展示了基于 LCE 条带的单次触摸机械响应。当振荡器处于阻尼稳定状态时,条带保持静止。当手指触碰在凝胶管从而改变光照位置,导致传输点处传输光强度瞬时增加,以及随后加热点处的热过冲,从而引起 LCE 的热致弯曲。当停止触碰凝胶管,LCE 的形状会自动恢复。在另一个体系中,作者将施加了预应力的塑料悬臂通过热敏胶水固定在了凝胶管上。当连续多次触碰凝胶管的时候,更高的频率会导致通过传输点输入的时间平均光功率更高,引起高温下胶水的熔化以及悬臂的瞬间快速释放(图3j)。而低频率的机械刺激不会导致悬臂的响应,由此实现对机械触碰的频率门控。本工作对实现刺激响应材料的信号传导、以及实现材料之间的“交流”具有重要意义。
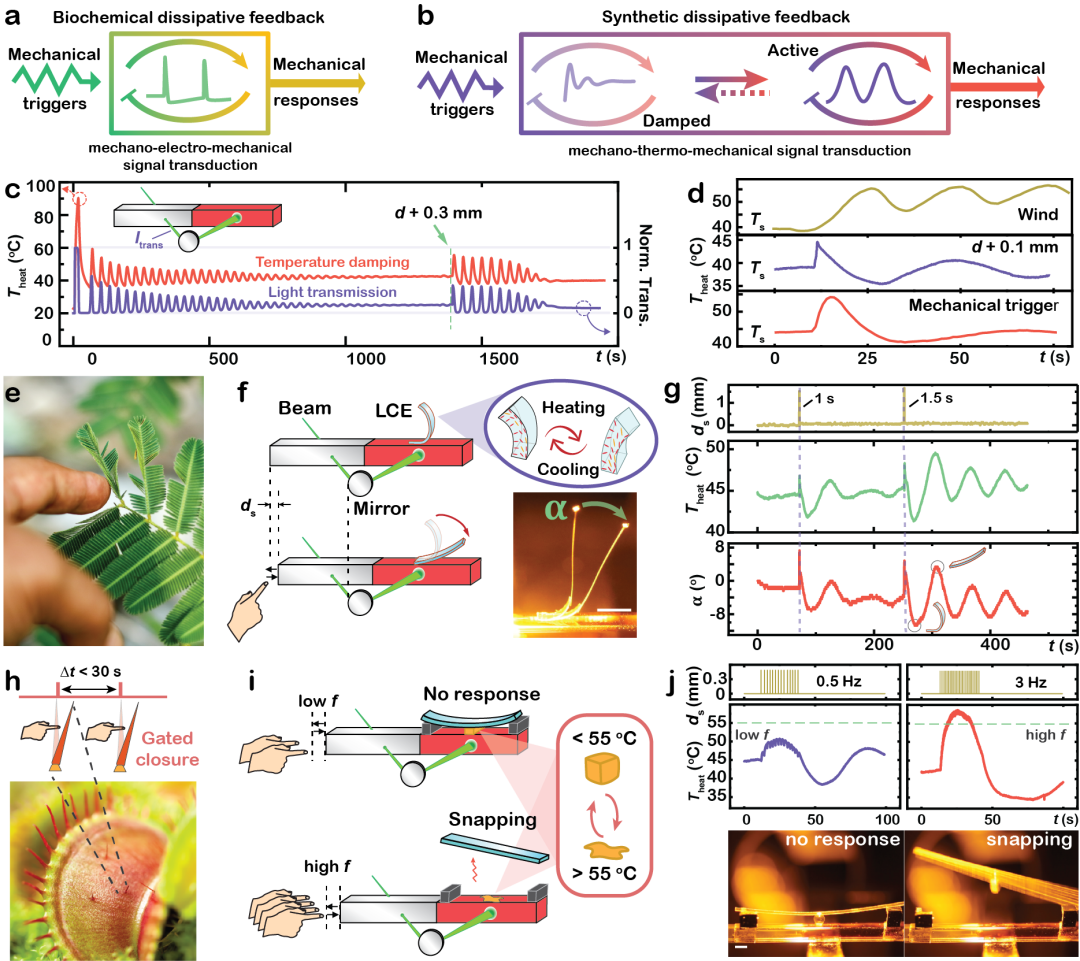
图4. 基于负反馈体系的信号传导及生物启发响应。
小结
本文提出了一种由光驱动的负反馈控制水凝胶体系,其在恒定的光照能量输入下可产生稳定的温度自震荡或阻尼稳态。该体系具有内稳态特性,可在不同外界刺激下保持一定区域的温度恒定。在阻尼稳态下,该体系对外界刺激高度敏感,并可由此构建机械刺激的信号转导,实现生物启发功能,例如仿生捕蝇草的频率门控。
论文链接:
https://www.nature.com/articles/s41565-022-01241-x
来源:高分子科学前沿