2023有源医疗器械创新论坛速递液态金属磁性软体机器人领域的重要成果
2023-10-26
有些新材料正处于由示范转向商业化初期的阶段如钠离子电池、液流电池、固态电池、金属空气电池等;有些已经实现大规模商业化,如锂离子电池。而液态金属材料因其优异的物理、化学特性,被应用于消费电子产品、新能源汽车产品、储能产品、耳机等领域,并在医疗器械、智能制造、高端体育器材及航空航天等展现出广阔的应用前景。
一、研究背景
与刚性机器人相比,软性机器人能以更大的自由度变形,并能吸收更多碰撞产生的能量,这为弥合机器与人之间的差距提供了机会。当软机器进一步缩小到小尺寸(毫米及以下)时,衍生出的微型软机器人有望在人体内部难以接近的区域执行任务,因此它们能够为广泛的生物医学领域带来变革。目前已开发出多种策略来驱动和控制小型软机器人,其中,磁性微型软机器人因其组织透明性、远程操作能力以及精确、快速而简单的磁场调制而受到广泛关注。这类机器人一般是通过将磁性物质(如铁粉、钕铁硼微粒、氧化铁磁性纳米粒子等)编码在弹性体、水凝胶和流体等软材料基体中而设计制造的,在外加磁场的作用下,可按需变形并实现一系列运动行为,如滚动、爬行、跳跃、游泳等。具体来说,与基于聚合物的机器相比,由磁响应流体构成的微型软机器人通常具有更高的柔软度和变形自由度,使其更能适应生物医学应用中动态和非结构化的工作环境。
迄今为止,水和有机溶剂已被广泛用作基于液体软机器人的基质,但由于其潜在的附着、蒸发和毒性风险,在复杂的生理条件下会带来挑战。在这方面,镓基液态金属(LM)具有良好的不混溶性、柔韧性和生物相容性,为我们提供了另一种选择。通过与金属磁性粉末(如Fe、Ni、NdFeB和Gd)混合,磁性 LM 复合材料已经制备出来,通过对磁场进行编程,可以表现出各种可控的机器人行为。然而,随着时间的推移,LM 与金属掺杂剂之间不可避免地会发生合金化反应,这将导致磁性材料晶体结构的转变,从而逐渐降低磁响应性能。为此,Lu 等人在与 LM 混合前在铁粉表面涂上一层银壳,作为牺牲层与 LM 发生反应,从而保护铁粉免受腐蚀。不过,混合磁粉如果泄漏或溶解到周围环境中,可能会对生物造成伤害,而目前的磁性 LM 复合材料极有可能出现这种情况。因此,新的研究重点转移到了将惰性和生物兼容的氧化铁(Fe3O4)磁性颗粒加入 LM 中,而最重要的问题是解决 Fe3O4 和 LM 之间因表面能严重失配而造成的界面不润湿性。虽然有报道称,剧烈的机械研磨能有效地促进无机氧化物(如氧化石墨烯、Al2O3 等)通过配位结合与 LM 复合,但这仍然是一个耗时耗力的过程,需要在掺杂颗粒上形成 LM 表面氧化物层。因此,这些氧化膜会削弱 LM 的流动性,但如果将其去除,氧化物颗粒在外部刺激下很容易渗出,从而使制备的功能复合材料失效。因此,基于 LM 的磁性微型软机器人非常需要氧化铁和 LM 之间的有效组成策略,以保证令人满意的柔软性、磁性和稳定性。
在此,哈尔滨工业大学马星教授团队报告了一种简便的磁性 LM 复合材料制备方法,该方法能够通过 LM 与 Ag 外壳修饰的 Fe3O4 纳米粒子之间的反应润湿,在共晶镓铟 (EGaIn) 中加入不可润湿的氧化铁磁性纳米粒子(图 1)。通过用聚多巴胺(PDA)层和Ag纳米粒子对 Fe3O4 纳米粒子进行功能化处理,磁性剂(Fe3O4@PDA@Ag,FPA)之间的界面润湿性和LM的性能得到了显著改善,从而可以使用机械研磨、电化学熔融和酸促进的融合等多种方法快速、彻底地进行合成。详细的显微表征结果表明,Ag 和铟(In)成分合金化反应形成的 AgxIny 金属间化合物(IMCs)是将 Fe3O4 纳米粒子嵌入和固定到 EGaIn 基体中的锚定位点,从而有助于提高悬浮稳定性。通过这种方式,他们通过精心调节 FPA 的质量分数,成功制备出了具有理想流动性和磁性的磁性 LM 复合材料,可用作小型软机器人,在外加磁场的驱动下按需进行变形和运动。此外,所开发的与生物组织不相容的软机器人能够在集成了磁铁的机械臂控制下,通过成像模式(如内窥镜和 X 射线成像)进行原位监测,在离体猪胃中进行灵巧导航和有针对性的货物运输。因此,他们的方法为扩展基于 LM 的磁性微型软机器人在介入治疗和微创手术中的应用提供了一种通用策略。相关研究工作以“Room-temperature phosphorescent materials derived from natural resources”为题发表在国际顶级期刊《Nature Communications》上。祝贺!
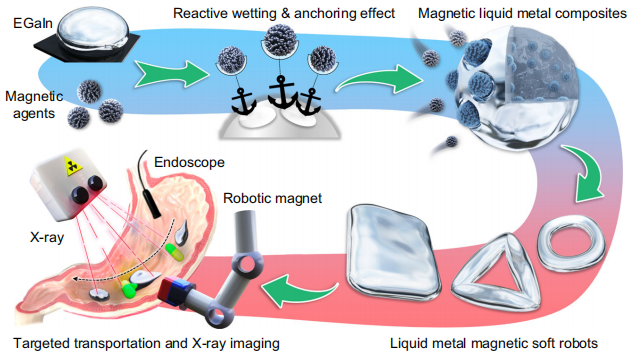
图1. 通过反应润湿和锚定效应制备液态金属磁性微型软机器人的方案
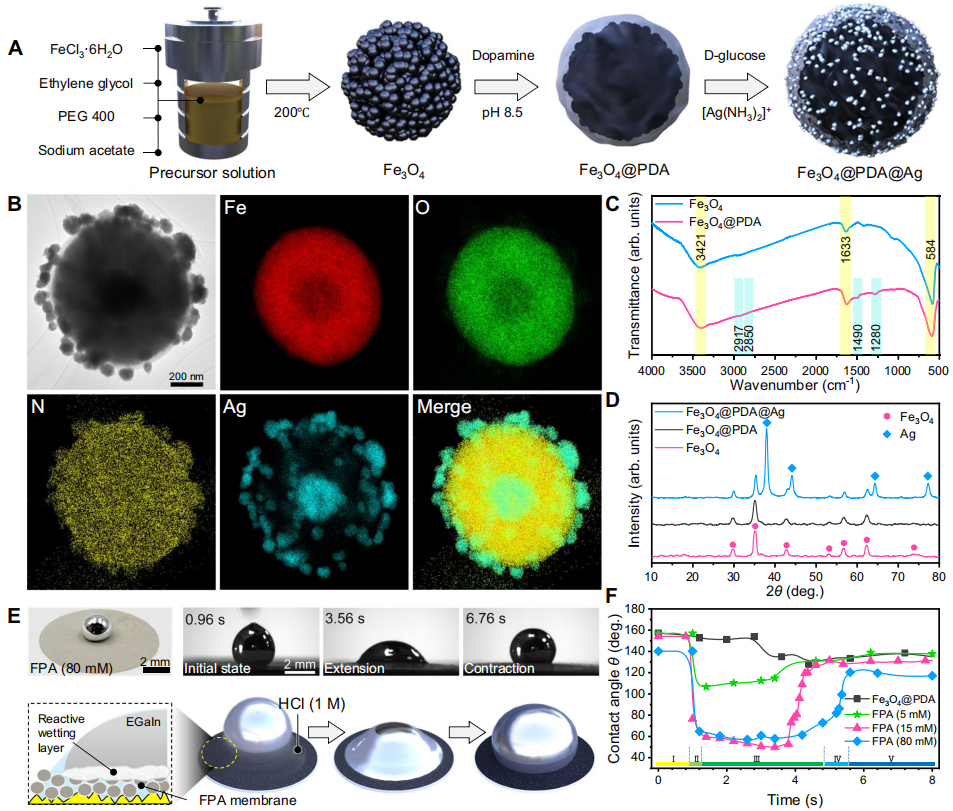
图2. 氧化铁磁性剂的制备和润湿性调节
为了能够与 LM 复合,特意设计了氧化铁(Fe3O4)磁性纳米粒子的成分和表面特性。由于LM的润湿能力,选择银作为中间层来功能化Fe3O4纳米颗粒,得到核壳结构的磁性剂。图 2A 展示了制备过程,其中采用水热法合成了平均直径约为 850 nm 的单分散 Fe3O4 纳米粒子。
随后,图 2B 展示了所获得磁性剂的透射电子显微镜(TEM)图像和能量色散 X 射线(EDX)光谱图,清楚地显示了其核壳结构形态,以及Fe、O、N和Ag的元素分布。傅立叶变换红外光谱(FT-IR,图 2C)和 X 射线衍射(XRD,图 2D)图谱用于表征制备过程中组分的变化。如图 2E 所示,当使用 FPA(80 mM)膜时,桃形 EGaIn 液滴(接触角大于 140°)在加入盐酸后立即变得扁平,接触角小于 59.8°,这表明 FPA(80 mM)与 EGaIn 之间具有良好的润湿性。然而,随着时间的推移,EGaIn 液滴重新变为球形,接触角也随之增加到 118.6°。EGaIn 液滴在不同 FPA 膜上的接触角随时间的定量变化见图 2F,可进一步分为五个阶段。
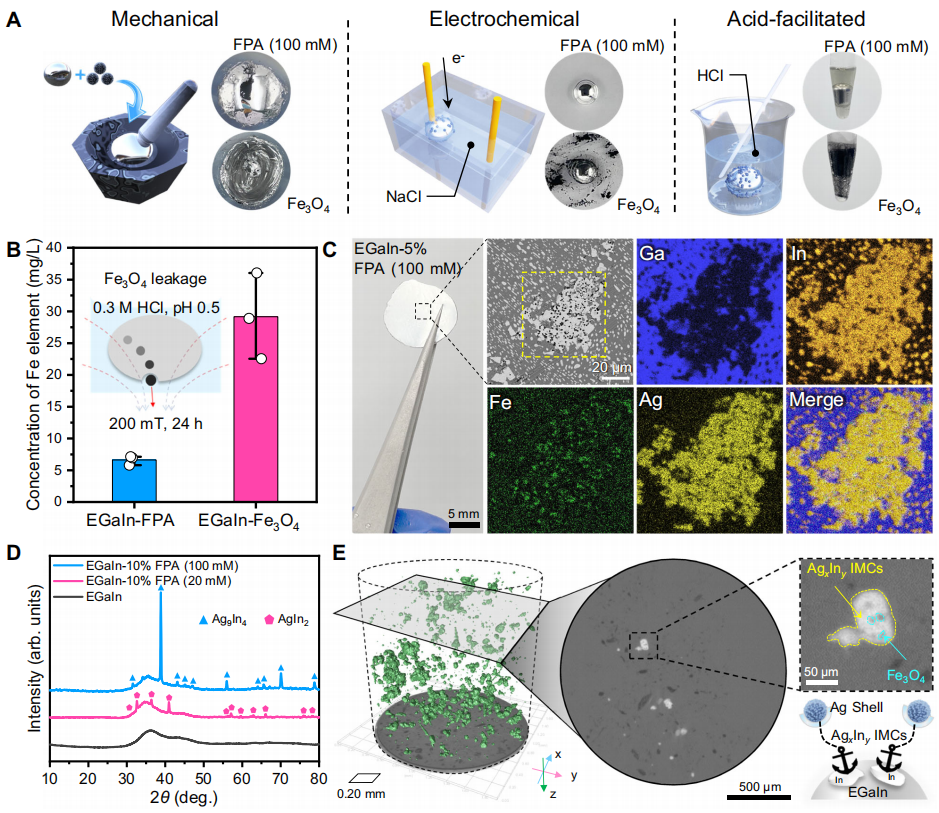
图3. 磁性液态金属复合材料的制备及其锚定效应机理
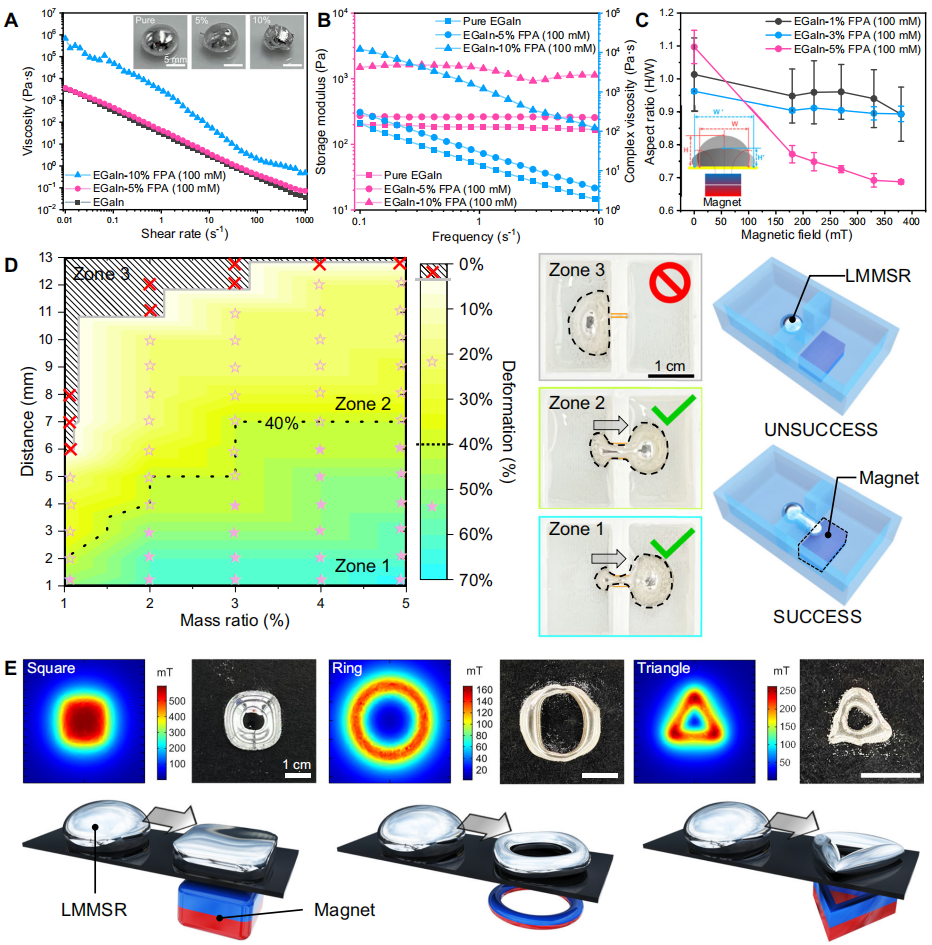
图4. 液态金属磁性软机器人(LMMSR)的可控变形
图5. LMMSR的按需磁操作
除了变形性能外,还要求 LMMSR 能够按需执行任务,如跨越障碍、运输货物、拆分、合并等,以满足多种应用场景的需求。例如,如图 5A 所示,在酸性溶液(1 M HCl)中,通过沿 L 和 M 的轨迹移动外部磁铁,LMMSR 可以准确地跟踪路径。图 5B 显示,在一个 S 形通道中,位于相对两端的两个 LMMSR 在磁铁的引导下先后穿过狭窄的路径,然后在中心相遇(t = 12 s)。然后,由于流体特性,两个 LMMSR 会顺利融合成一个更大的 LMMSR,并拥有前者的所有特性。因此,融合后的 LMMSR 仍可改变其形状,以适应周围不断变化的边界,从而转过一个正交角,最终到达目的地。图 5C 中的 LMMSR 完成了更复杂的任务,包括导航、变形、货物运输和拆分。
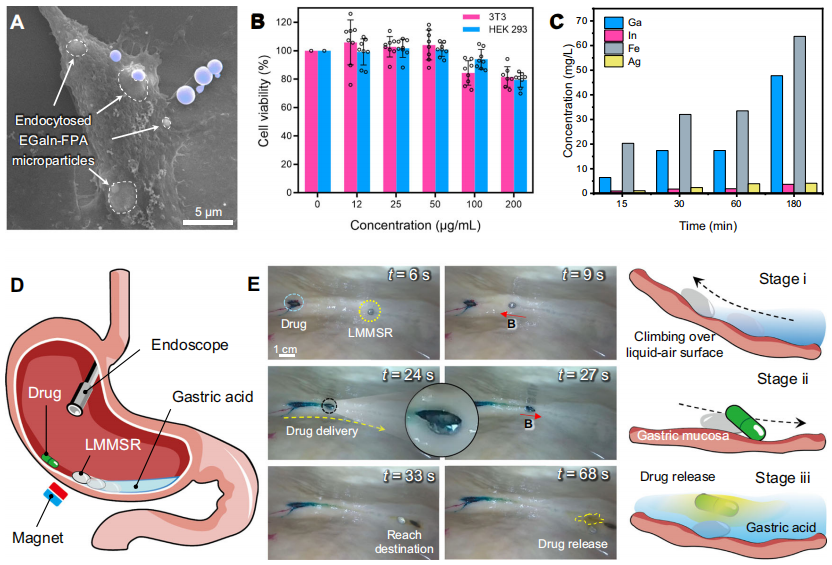
图6. LMMSR的生物相容性分析和药物胶囊在离体猪胃中的递送演示
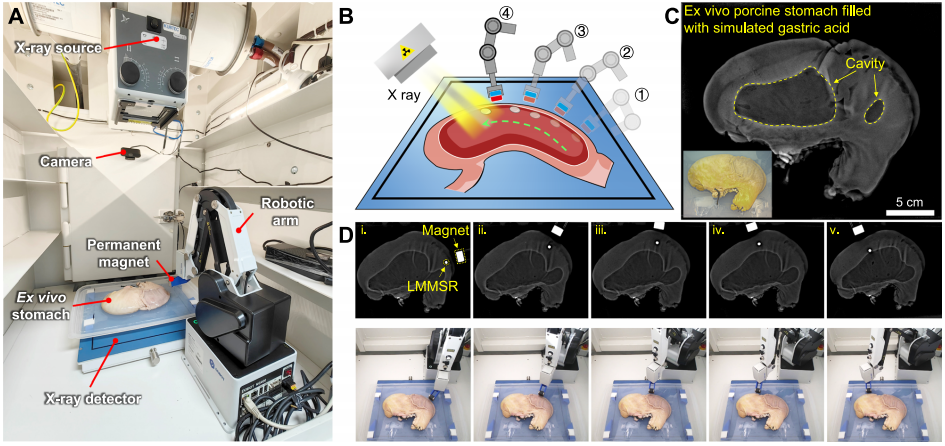
图7. 在X射线成像系统监测下LMMSR在离体猪胃中的可控导航
利用 EGaIn 的高质密度,他们进一步采用了基于 X 射线的成像系统来监测体外猪胃内软机器人的状态。如图 7A 所示,注射 LMMSR 后,用手术缝合线将装满模拟胃酸的胃密封起来以防止胃酸渗漏,然后将其放入成像系统中,该系统主要由 X 射线源和探测器组成。系统内部安装了固定在机械臂上的磁铁,用于磁力控制。通过调整机械臂的位置和姿势,可以调节外部磁场,从而以远程方式灵巧地驱动 LMMSR(图 7B)。系统中还安装了一个摄像头,用于观察机械臂的运行情况。实验前,首先对原始的活体胃进行成像,如图 7C 所示,可以清晰地观察到其内部沟壑,而空腔则代表酸溶液未完全填充的区域。然后在机械臂的辅助下,利用外部磁场对 LMMSR 进行原位转向,并很好地控制其运动轨迹(图 7D)。
2023有源医疗器械创新论坛Medtec创新展强势会议材料论坛将结合生物医用材料、精密配件及生产中精密的加工工艺在医疗器械中的应用为器械生产商和供应商提供交流平台。如果您在医疗器械材料行业深耕,不妨立刻点击报名加入2023有源医疗器械创新论坛Medtec创新展,为您拓展更多商机,为器械生产商和供应商提供交流平台。
在此,他们提出了一种复合制备策略,以消除表面能的实质性失配,并改善 LM 与金属氧化物之间的润湿性,从而通过多种融合法实现 EGaIn 与 Fe3O4 纳米粒子的简便快速结合。通过引入中间银层调节 Fe3O4 纳米粒子的润湿性后,银与铟成分之间的合金化反应诱导了 EGaIn 液滴在 FPA 膜上的延伸和收缩。详细的表征结果表明,生成的 AgxIny IMCs 有利于将磁性物质限制在 EGaIn 的内部液相中。因此,在金属键相互作用和 AgxIny IMCs 不规则形态的帮助下,氧化铁磁性物质可以在酸性环境下稳定地悬浮在 LM 中,当施加外部磁力时仍能发挥作用。通过外磁场编程,制备的 LM 复合材料表现出多种可控的变形和运动行为(被动/主动变形、分裂、融合、迁移等),进一步证明了其能够在体外进行靶向货物运输。最后,在内窥镜和 X 射线成像的监测下,他们验证了将所开发的生物相容性 LMMSR 应用于离体猪胃的可行性,为实现基于 LM 的微型软机器人的临床应用迈出了一步。
2023有源医疗器械创新论坛Medtec创新展相信,未来所提出的策略将有助于改善 LM 与一系列无机非金属材料之间的润湿条件,促进多功能 LM 复合材料的开发。值得注意的是,为评估生物相容性而制备的 EGaIn-FPA 微颗粒还具有 LM 的特性(如柔性、导电性、光热特性和抗菌特性),可应用于柔性电子、活性微尺度焊接和纳米医学等多个领域。此外,基于新兴功能性 LMs 的磁性软机器人可提供具有自主移动能力的金属基平台,用于主动金属支架移除、生物膜清除等临床平移。
文章来源:材料PLUS