2024有源医疗器械创新论坛Medtec香港中文大学袁武与任洪亮教授团队最新 Sci. Adv.|机器人内窥OCT
2024-09-24
根据2024有源医疗器械创新论坛Medtec调查发现,香港中文大学袁武和任洪亮教授团队论文“PneumaOCT: Pneumatic optical coherence tomography endoscopy for targeted distortion-free imaging in tortuous and narrow internal lumens”发表于国际知名期刊《Science Advances》,并被选为当期“Featured image”之一!
论文作者:Tinghua Zhang(张廷华), Sishen Yuan(袁思申), Chao Xu(徐超), Peng Liu(刘鹏), Hing-Chiu Chan(曾慶昭), Sze Hang Calvin Ng(吴士衡), Hongliang Ren*(任洪亮), Wu Yuan* (袁武)
论文简介
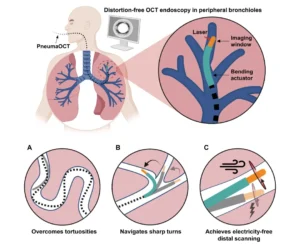
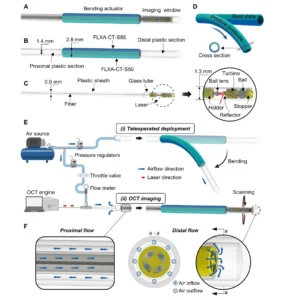
该论文提出了一种创新的气动光学相干断层扫描(PneumaOCT)内窥镜,旨在实现对复杂和狭窄内部腔道的精准成像。PneumaOCT由有可操控的导管和微型气动涡轮成像探头组成,直径为2.8毫米,能够在高达237°的弯曲角度下灵活导航。其气动涡轮支持51至446转每秒的可调成像速度。研究展示了PneumaOCT在活体小鼠食道和结肠的成像能力,以及在支气管模型和猪肺中的靶向无失真目标成像。这一技术显著提升了内窥OCT在曲折和狭窄腔道中的导航成像能力。
论文相关图片
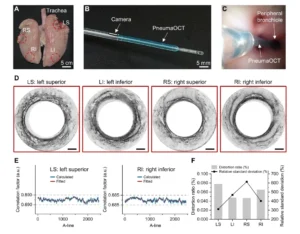
PneumaOCT的应用
PneumaOCT的设计
PneumaOCT在离体猪肺靶向部署与无畸变成像
2024有源医疗器械创新论坛Medtec现场将设四大专区,囊括电子光学、AI、IVD诊断及影像、检测、临床、法规、研发设计& 大动物实验专区等展品,点击此处报名参展>>>
研究意义
与现有的机器人 OCT 内窥镜以及商用支气管镜和胃肠镜相比,所提出的 pneumaOCT 实现了更小的直径和更大的弯曲角度。此外,pneumaOCT 允许通过曲折的管道,这对当前的设备来说是一个挑战。在手术室内用更用户友好的气流装置代替复杂的电机系统,有利于临床应用。它还能够在没有电力的情况下在曲折的管腔中进行有针对性的部署和无失真成像,在可操纵性和安全性方面优于以前的 OCT 内窥镜。此外,pneumaOCT 的低成本增加了其在临床环境中广泛应用的可及性。最后,通过将 pneumaOCT 附着在 MRI 水模表面,确认了它的 MRI 兼容性,证明了 MRI 和 pneumaOCT 可以同时使用。虽然 pneumaOCT 对于生成高分辨率诊断图像很有价值,但它在可视化更大和更深的解剖结构和提供功能信息方面存在局限性。相比之下,MRI 具有出色的软组织对比度、多平面成像能力以及功能和生理成像的潜力。因此,MRI 可用于引导 OCT 探头的部署,从而可以有针对性地在原位评估病理并增强对治疗反应的评估。同样,X 射线和内窥镜与 pneumaOCT 的结合也具有协同优势。X 射线成像(例如荧光透视)可提供具有毫米分辨率的宏观结构解剖信息,有助于术前规划和术中指导。另一方面,支气管镜检查、结肠镜检查和腹腔镜检查等内窥镜检查技术可以实时可视化管腔,有助于准确部署 pneumaOCT 以针对性地评估体内疾病和相关病理。
未来工作展望
2024有源医疗器械创新论坛Medtec认为,未来,将通过整合外部自动化机器人系统、图像导航引导(如 X 射线成像或核磁共振成像)以及智能传感和控制算法,进一步开发自主气动 OCT 内窥镜系统。这将对复杂临床实践中机器人内镜技术的发展产生重大影响。期望PneumaOCT的发展可能推动机器人内窥镜在复杂腔道的检查。
文章来源:智能生医成像实验室